Gazebo仿真器使用具有高保真度(degree of fidelity)的物理引擎,可以在加载机器人模型后,添加传感器(比如IMU传感器和摄像机)和物体模型,搭建各种复杂的室内或室外的环境场景。Gazebo除了加载机器人等模型,还可以检测碰撞、测量位置等。
01 Gazebo基本特点1
通过一个简单的机器人demo对Gazebo的特点和功能进行展示。
Typical uses of Gazebo:
-
机器人设计
-
测试机器人算法
-
执行带有真实场景的回归测试2(regression testing)
Key Features of Gazebo:
- 具有多种物理引擎
- 丰富的机器人模型库和环境库
- 支持各种传感器
- 方便的编程和图形界面
02 Ubuntu安装Gazebo
- Download the installer:右键保存shell文件
gazebo.sh到磁盘目录,比如~/Downloads - 运行
chmod +x ~/Downloads/gazebo.sh - 运行
gnome-terminal --working-directory="~" -e "./Downloads/gazebo.sh"
03 界面说明
运行Gazebo:ALT+F2在弹出的对话框输入要运行的命令gazebo
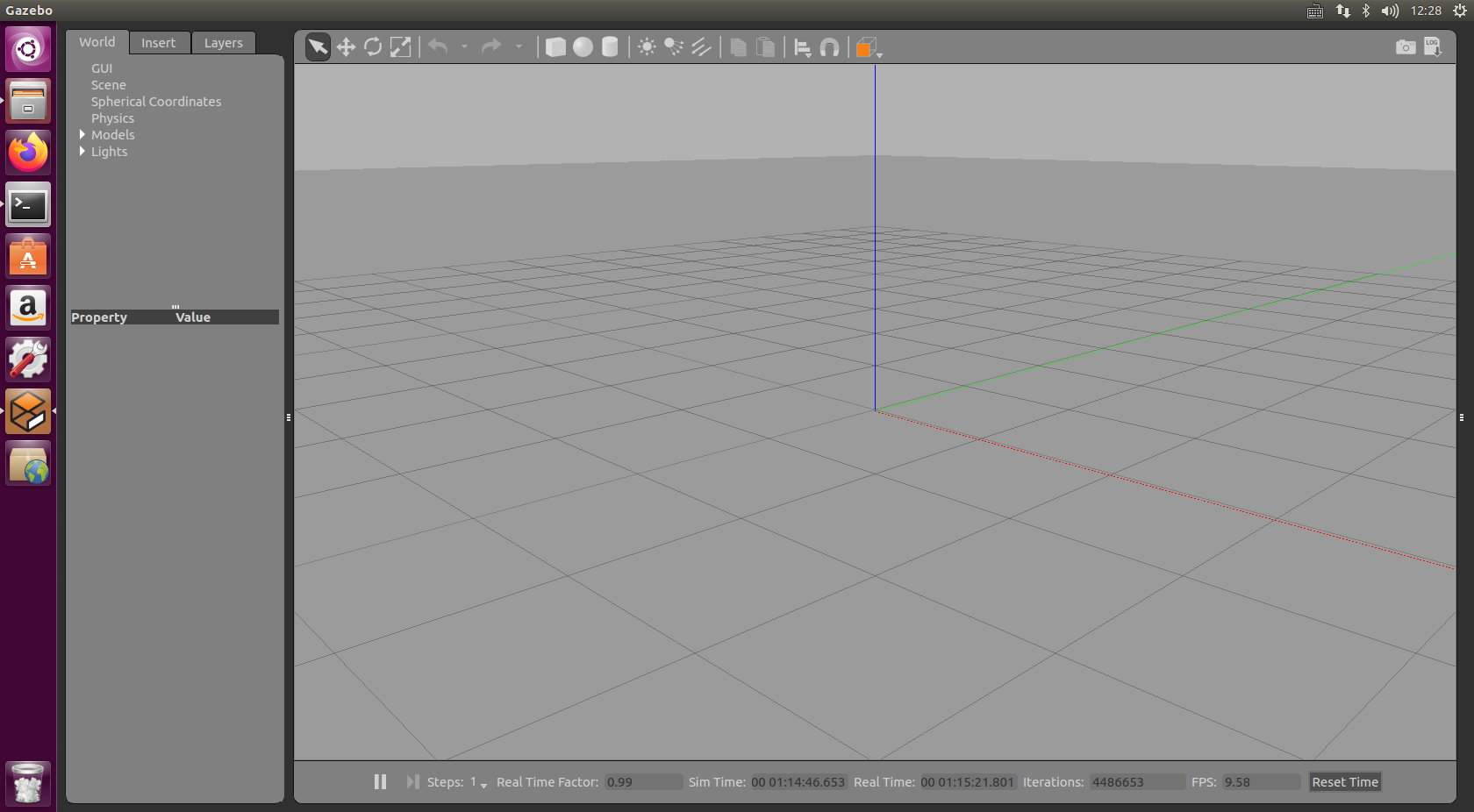
场景部分Scene:仿真物体动画展示、与环境交互
面板Panel: 通过拖动面板与场景的分隔条可以display/hide/resieze
-
左面板有3个Tag
-
World:显示当前场景中的模型,可以修改模型参数,比如改动模型的位置。可以展开
GUI选项调整相机视角。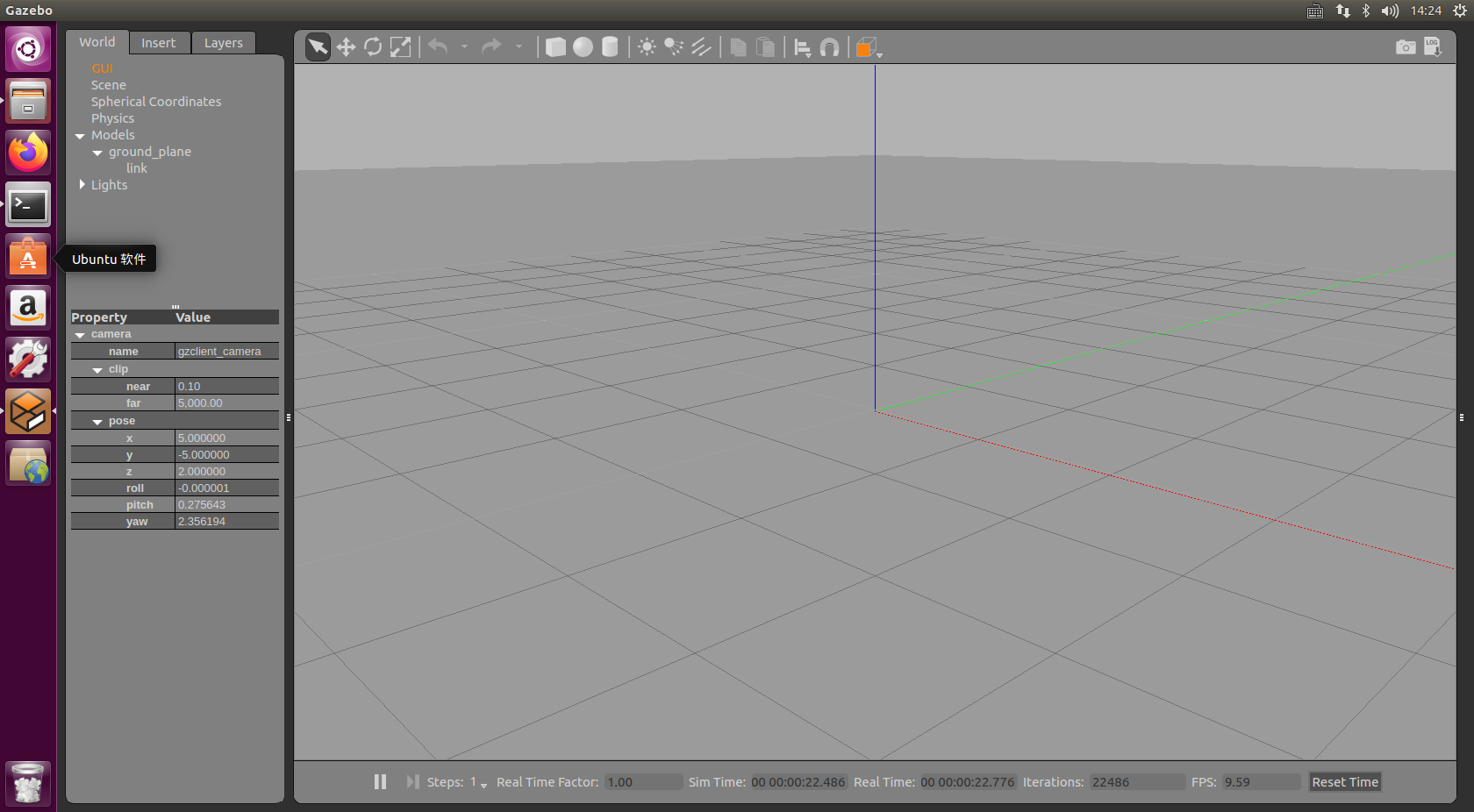
-
**Insert:**顾名思义,就是添加新物体和新模型的标签选项。
-
Layers: 组织和显示一个或多个模型构成的group,更多相关参考Visibility Layers教程。
-
-
右面板
- 默认关闭,通过拖动面板与场景的分隔条可以拉出。
- 关节交互面板,与选定模型的可动作组件进行交互。
工具条Toobars
-
上方工具条
交互工具:选择、移动、旋转、缩放按键
创建简单形状(例如方块、球体和圆柱体等)

-
底部工具条
显示仿真数据:仿真时间Simulation Time(仿真中时间可以比实际时间快或慢,这取决于仿真的计算任务的繁重)。
Gazebosh中世界的状态迭代一次计算更新一次。默认迭代时间步长是1ms.

菜单栏Menu

鼠标使用Mouse Control
用鼠标进行场景导览与视角变更

04 模型编辑
构建模型
- 简单模型可以通过用户界面创建
- 复杂的机器人模型等需要写SDF(Simulation Description Format)文件,更多相关可以参考Gazebo教程:Build a Robot
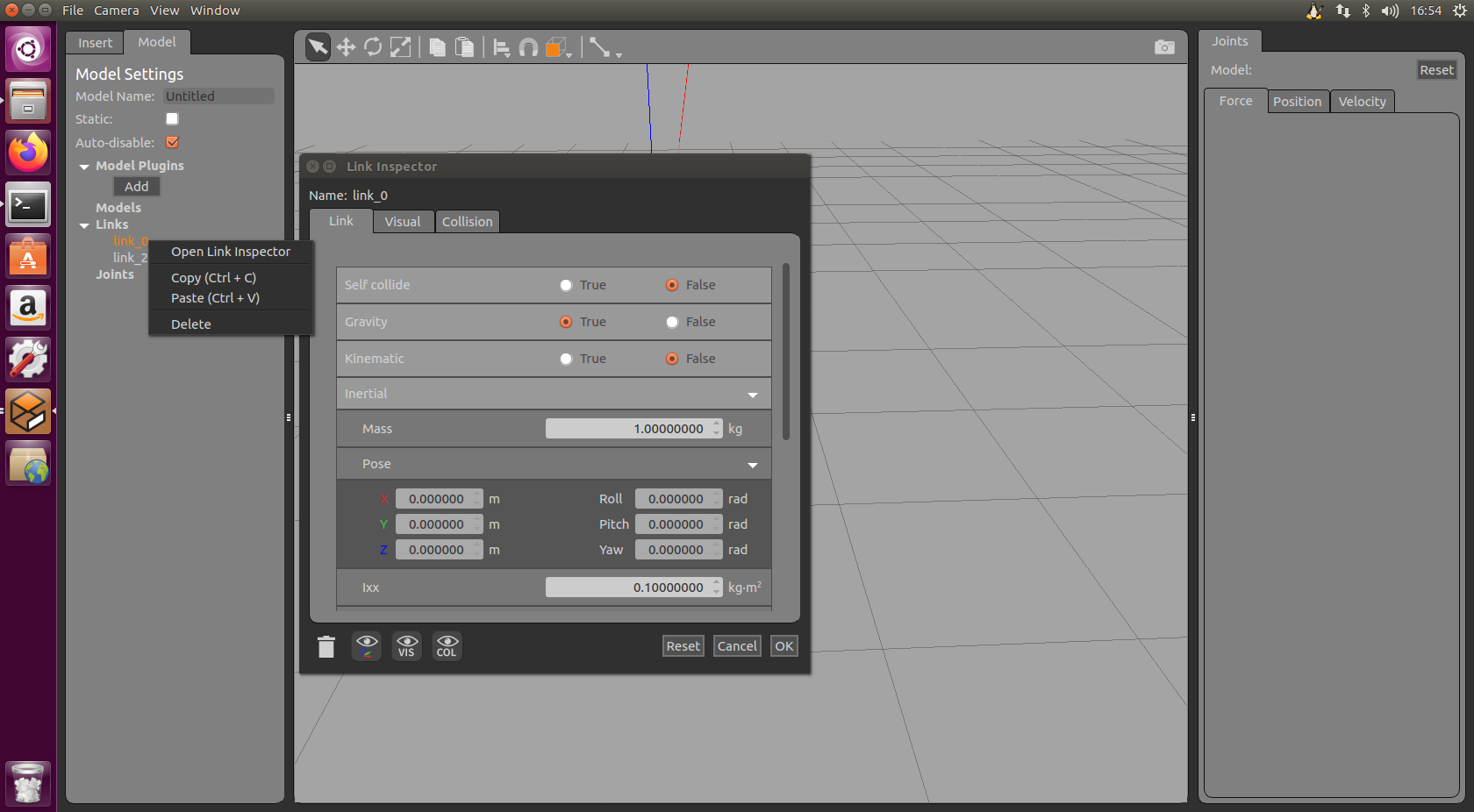
菜单栏选择Edit/Model Editor打开模型编辑器(Ctrl+M)

- 工具条:用于模型编辑
- 左面板,包括
Insert Tag:添加关节和嵌套模型Model Tag:修改模型属性和内容
左面板/Insert Tag
主要用于添加新的关节和模型,包含以下三部分:
- 简单形状:三种原型的几何形状,to form a link in the model
- 自定义形状:导入自定义的
meshes(支持COLLADA.dae, 3D Systems.stl, Wavefront.objand W3C SVG.svg文件格式) - 模型数据库:添加模型库中各种模型,to form a link in the model,称作
嵌套模型Nested Models
左面板/Model Tag
可以设置模型名称和基本参数,此时面板可以看到众多的links、joints、nested models and plugins.
可以通过右击模型打开链接观测器Link Inspector修改模型参数
模型编辑器目前
- 不能在嵌套模型中编辑嵌套模型和连杆
- 不能添加包括平面、折线等几何原型
- 不支持高度图(height maps)
- 不带有CAD功能
Reference
- CSDN | ROS学习笔记之——gazebo仿真
Footnotes
-
Gazebo Tutorial | Beginner Overview ↩︎
-
运行所有的测试用例(test case),以验证没有退化情况发生,这一过程就是回归测试。 ↩︎
「真诚赞赏,手留余香」
 Self-Disciplined and Motivated
Self-Disciplined and Motivated
真诚赞赏,手留余香
使用微信扫描二维码完成支付

comments powered by Disqus