通过GUI或者命令行,记录仿真过程日志,随后复盘。
Gazebo的日志文件是压缩的.log文件,包含对整个世界的初始完整描述(从场景到展示实例)以及世界状态信息。世界状态记录的是仿真中每一次的变化,例如:
- 仿真数据:仿真时间、迭代次数
- 每个模型的目前状态以及模型中连杆和关节的状态:即时位置(instantaneous pose)、速度、加速度和力信息。
- 每个光源的当前位置
01 通过GUI记录日志
-
打开一个双向摆(double pendulum)的简易世界。
-
Ctrl+D,打开数据日志记录器(Data Logger),开始记录日志- 可以修改log文件的保存目录,比如我们可以将其保存至
~/logs/double_pendulum/
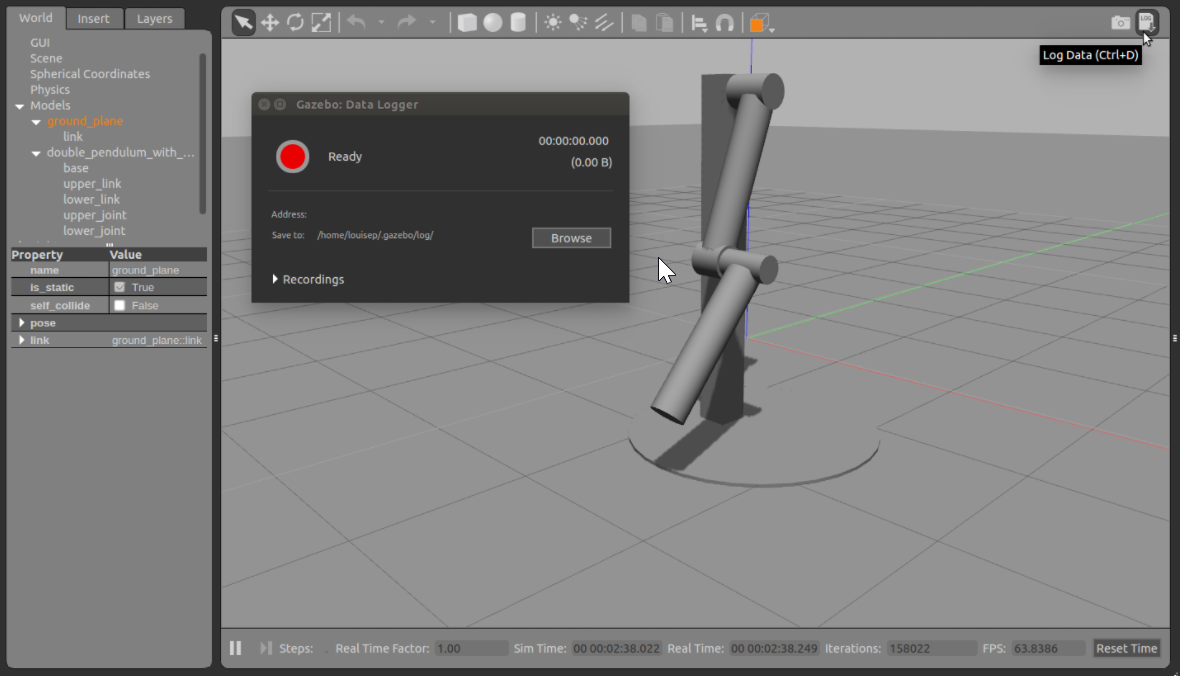
- 可以修改log文件的保存目录,比如我们可以将其保存至
-
点击红色按钮即开始记录日志,过程中可以看到log文件中的字节数量不断增加。
只有随时间发生变化的models和lights会被记录,如果场景是静态场景,log文件中的字节数量不会改变,也就是说,log文件中的样本数量会合仿真中的迭代次数不同。
-
点击红色按键,停止日志记录。
-
展开
Recordings折叠选项卡,可以看到生成的state.log文件,还会发现这个文件在一个带有时间戳的目录下。
02 通过命令行记录日志
命令行方式,可以记录全部仿真过程的日志,也可以在仿真任意时间开始记录。
记录整个仿真过程
按下面指令启动和运行Gazebo
$ gazebo -r --record_path ~/logs/random_velocity worlds/random_velocity.world
-r[–record]:从Gazebo打开开始到关闭结束,记录日志
–record_encoding arg:log数据的压缩编码格式,默认为
zlib,可选bz2和txt.
执行该命令,日志记录到Gazebo关闭。
按上述路径可以查看生成的state.log文件。
$ ls ~/logs/random_velocity/
state.log
部分仿真过程的日志记录
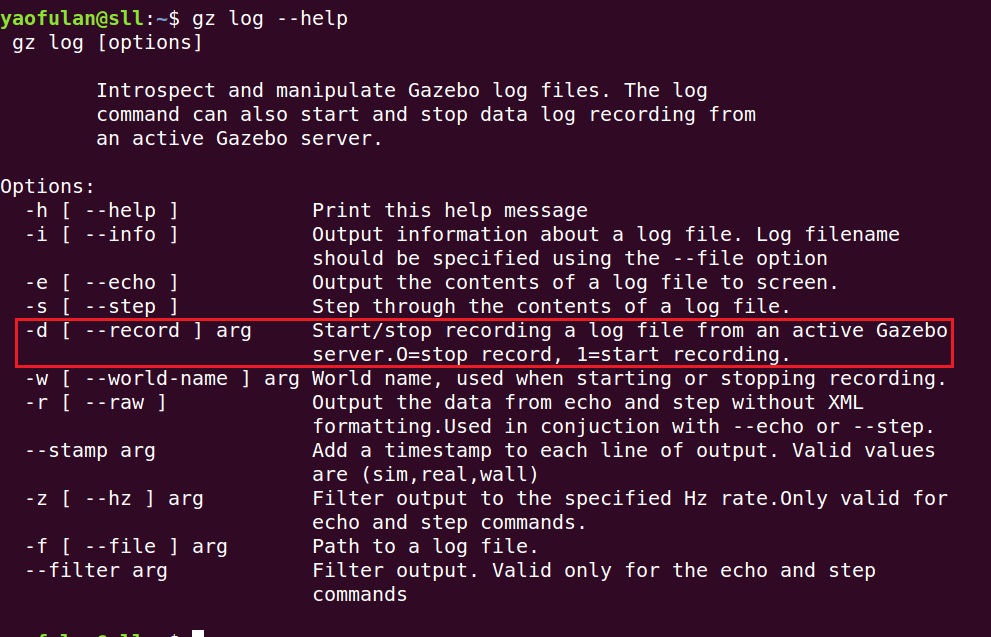
gz log:用来在任意时刻触发日志记录动作。Gazebo运行后,在新的终端执行以下命令就开始记录日志:
$ gz log -d 1
执行下面命令,终止日志记录
$ gz log -d 0
03 日志文件的回放
replay/introspect a log file visually
GUI中回放
按以下指令启动和运行Gazebo,其中参数选项-p用于指定一个log文件,-u表示开始回放
$ gazebo -u -p ~/logs/double_pendulum/2016-01-25T15\:09\:49.677400/gzserver/state.log
然后Gazebo会在回放模式下运行,可以播放/暂停、倒带/快进等。

04 log state文件的解析1
gz log命令配合其参数选项可以查看log文件,比如
-s可以步进一个log文件
$ gz log -s -f ~/logs/double_pendulum/2016-01-25T15\:09\:49.677400/gzserver/state.log
You’ll see the full initial SDF representation of the world, something like this:
<?xml version='1.0'?>
<gazebo_log>
<header>
<log_version>1.0</log_version>
<gazebo_version>7.0.0~pre1</gazebo_version>
<rand_seed>10622214</rand_seed>
<log_start>43 380000000</log_start>
<log_end>69 651000000</log_end>
</header>
<chunk encoding='txt'><![CDATA[
<sdf version ='1.6'>
<world name='default'>
(...)
<light name='sun' type='directional'>
(...)
</light>
<model name='ground_plane'>
(...)
</model>
<model name='double_pendulum_with_base'>
(...)
</model>
</world>
</sdf>]]></chunk>
--- Press space to continue, 'q' to quit ---
按下空格键,继续步进之后的状态。
<chunk encoding='txt'><![CDATA[
<sdf version='1.6'>
<state world_name='default'>
<sim_time>43 380000000</sim_time>
<real_time>43 478499228</real_time>
<wall_time>1453763389 677873530</wall_time>
<iterations>43380</iterations>
<model name='double_pendulum_with_base'><pose>1.140 -1.074 -0.000 0.000 -0.000 0.000 </pose><scale>1.000 1.000 1.000</scale><link name='base'><pose>1.13998 -1.07367 -0.00000 0.00000 0.00000 -0.00042 </pose><velocity>-0.0000 0.0000 -0.0005 0.0004 0.0030 0.0001 </velocity></link><link name='lower_link'><pose>1.38969 -1.79815 1.41059 -2.45351 0.00000 -0.00042 </pose><velocity>0.0042 -0.2557 0.2659 1.9694 0.0048 0.0001 </velocity></link><link name='upper_link'><pose>1.13999 -1.07367 2.10000 2.33144 -0.00000 -0.00042 </pose><velocity>0.0063 -0.0008 -0.0005 -0.3739 0.0032 0.0001 </velocity></link></model><model name='ground_plane'><pose>0.000 0.000 0.000 0.000 -0.000 0.000 </pose><scale>1.000 1.000 1.000</scale><link name='link'><pose>0.00000 0.00000 0.00000 0.00000 -0.00000 0.00000 </pose><velocity>0.0000 0.0000 0.0000 0.0000 -0.0000 0.0000 </velocity></link></model></state></sdf>
]]></chunk>
--- Press space to continue, 'q' to quit ---
注意到状态信息更密集(只包含世界中发生变化的模型和视角,而没显示sun和ground_plane的信息,因为这两者是不运动变化的)。
Reference
- Gazebo Tutorials:Logging and playback
Footnotes
-
Gazebo Log filtering:Introspect a log file ↩︎
「真诚赞赏,手留余香」
 Self-Disciplined and Motivated
Self-Disciplined and Motivated
真诚赞赏,手留余香
使用微信扫描二维码完成支付

comments powered by Disqus