本文主要介绍一些Gazebo组织架构相关的文件以及库类。
01 文件和插件
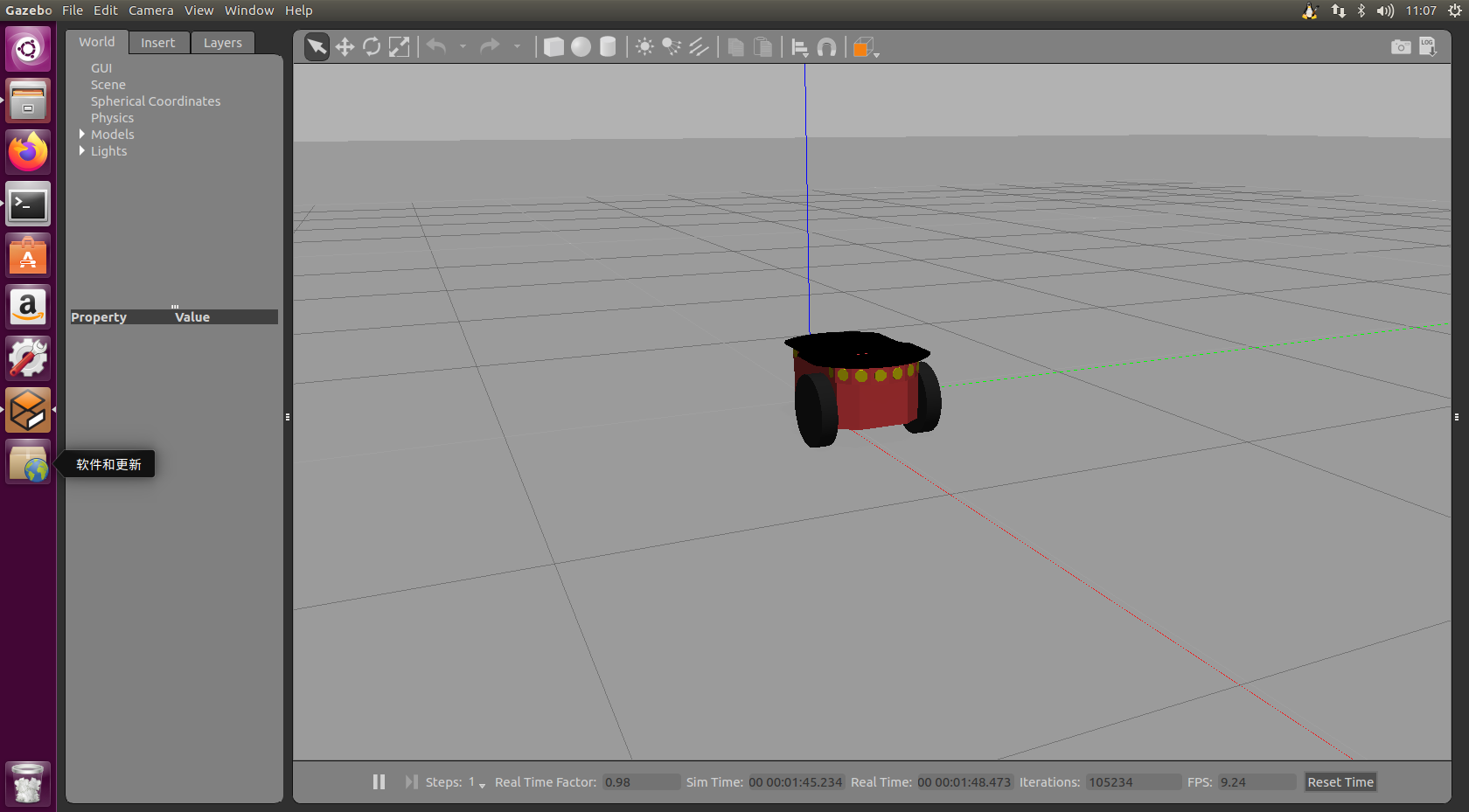
运行一个带有移动小车(pioneer2dx)的Gazebo环境
$ gazebo worlds/pioneer2dx.world
环境文件通常位于版本化的系统路径下,比如/usr/share/gazeb0-7/worlds
查看worlds
$ ls /usr/share/gazeb0-7/worlds
Gazebo启动运行命令gazebo实际上运行了两个可执行程序,分别是客户端gzclient和服务器gzserver
-
服务器
gzserver:物理循环更新,生成传感器数据,读取world文件生成和输入环境启动和调用
$ gzserver <world_name>world_name:- 相对当前路径,或相对
GAZEBO_RESOURCE_PATH变量中的某个路径 - 绝对路径,
/usr/share/gazeb0-7/worlds/empty_sky.world
- 相对当前路径,或相对
-
客户端gzclient:运行一个基于QT的用户接口,仿真的可视化,控制仿真属性
world文件一般包含机器人、光源、静态物体等的属性信息,属于格式化的仿真描述格式SDF文件。
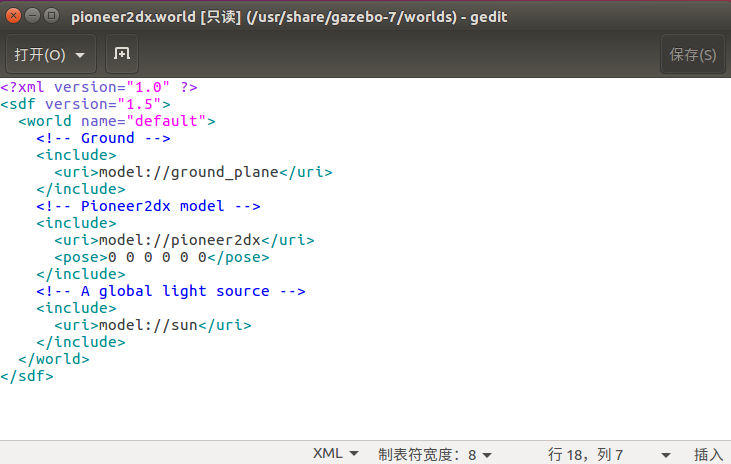
模型文件也是一种格式化的仿真描述格式SDF文件,它有且只有一组<model>...</model>标签。模型文件可以在world文件中调用。调用语法如下(SDF语法):
<include>
<uri>model://model_file_name</uri>
</include>
Github上的Gazebo在线模型库:osrf/gazebo_models,支持在Gazebo运行过程中加载在线模型。
插件Plugins提供了一种简单与Gazebo对接的机制,可以通过写命令行加载,也可以用SDF文件定义,加载过程中前者优先级更高。
- Server插件
$ gzserver -s <plugin_filename>
-s参数选项表示系统插件(a system plugin)<plugin_name>是GAZEBO_PLUGIN_PATH中插件共享库的名称 比如,运行RestWebPlugin插件$ gzserver --verbose -s libRestWebPlugin.so
- Client插件
$ gzclient -g <plugin_filename>
Gezebo7及以前版本:用
-g参数加载GUI PluginGazebo8及以后版本:用参数
--gui-client-plugin参数加载GUI插件比如,要运行
TimeGUIPlugin$ gzclient --gui-client-plugin libTimerGUIPlugin.so更多相关内容参考For more information refer to the plugins overview page.
02 环境变量
环境变量可以定位文件,建立客户端和服务器之间的联系。
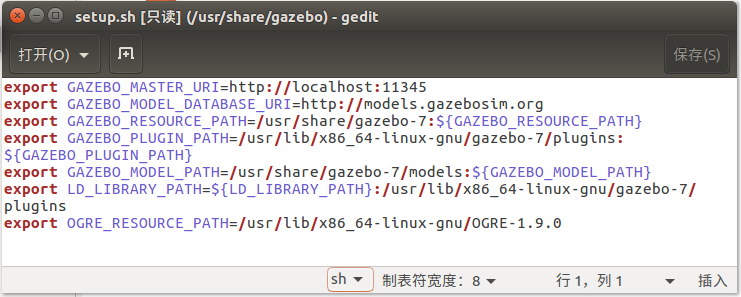
GAZEBO_MODEL_PATH: 逗号分隔的路径目录集合,用于Gazebo搜索模型
GAZEBO_RESOURCE_PATH: 逗号分隔的路径目录集合,用于Gazebo搜索world环境或媒体文件
GAZEBO_MASTER_URI: URI of the Gazebo master,用于给定服务器入口IP和端口,以供客户端连接。
GAZEBO_PLUGIN_PATH: 逗号分隔的路径目录集合,用于Gazebo搜索插件共享库
GAZEBO_MODEL_DATABASE_URI: 在线模型数据库的URI,用于Gazebo下载在线模型
以上环境变量的默认值可以在<install_path>/share/gazebo/setup.bash这个脚本文件中看到
如果需要作出修改,比如扩展搜索模型的路径,首先应该source环境变量(source <install_path>/share/gazebo/setup.sh),然后再修改setup.bash中的默认变量值。
Gazebo8开始使用Ignition Transpor1library进行进程间通信,一些功能是基于该开源通信库实现的,比如标志参照(markers)和绘图功能,这些功能还与下面的环境变量相关:
IGN_PARTITION: Ignition Transport nodes节点的分区名(partition name)IGN_IP: Similar toGAZEBO_MASTER_URI,但是面向的是Ignition Transport nodesIGN_VERBOSE: Show debug information from Ignition Transport更多相关内容参考Ignition Transport Tutorials
03 Gazebo架构介绍
Gazebo是分布式架构,各种单独的文件库,可用于物理仿真、模型渲染、用户接口和通信感知等。
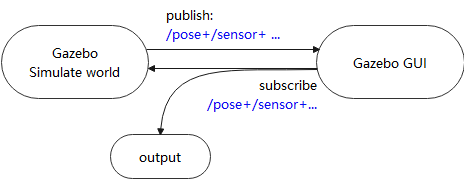
Gazebo服务器和客户端通过通信库进行通信。
3.1 进程间通信
采用开源的Google Protobuf2数据编解码协议,用于将消息序列化
采用boost::ASIO异步输入输出的传输机制
支持发布/订阅的通信范式
3.2 系统组成
Gazebo Master:本质是一个话题(a topic name server),名称查询和话题管理
通信库Communication Library:
- 依赖项dependencies: Protobuf和boost::ASIO
- 外部API:支持在命名话题上的Gazebo节点同通信
- 内部API:None
- Advertized Topics
- Subscribed Topics
目前只支持发布/订阅的通信方式。
物理库Physics Library:
- 依赖项:动力引擎(带有内部碰撞检测)
- 外部API:提供一个简单而又通用的物理仿真接口
- 内部API:定义了可以给第三方动态引擎使用的物理库的基本接口
物理库提供一个简单而又通用的物理仿真接口,包括刚体、碰撞形状、用于表征链式约束的关节。该接口集成了4个开源物理引擎:
- ODE(Open Dynamics Engine)
- BUllet(Bullet)
- Simbody(Simbody)
- DART(Dynamic Animation and Robotics Toolkit (DART))
通过这些物理引擎,用户可以加载XML格式的SDF模型文件,可以方便的使用集成的算法和仿真功能。
渲染库:
- 依赖:OGRE
- 外部API:创建和初始化场景
- 内部API:存储可视化元数据,调用OGRE API渲染3D scenes(包括GUI和传感器库)
渲染库包括光线、纹理和天空仿真,可以为渲染引擎写插件。
传感器生成库
- 依赖项:渲染库、物理库
- 外部API:初始化和运行传感器的功能
- 内部API:TBD
传感器生成库可以运行各种传感器,从物理仿真器中监听世界状态更新,产生输出。
GUI库
- 依赖项:渲染库、Qt
- 外部API:None
- 内部API:None
GUI基于Qt创建用于与仿真进行交互的图形组件,提供传感器数据可视化和日志记录工具。
插件库:物理库、渲染库和传感器生成库都支持插件,这些插件可以让用户不通过使用通信系统就可以访问这些库(物理库、渲染库和传感器生成库)。
Reference
- Gazebo’s worlds and Client/Server Separation
Footnotes
-
Ignition Transport,一款开源通信库,是Ignition Robotics的一款组件,提供快速有效的异步消息传递、服务和数据日志等功能。 ↩︎
-
Google Protobuf是一种平台无关,语言无关的结构化数据编解码协议,类似JSON或者XML,与这两者不同的是Protobuf采用的是二进制编解码方式,二JSON和XML是文本编解码 ↩︎
「真诚赞赏,手留余香」
 Self-Disciplined and Motivated
Self-Disciplined and Motivated
真诚赞赏,手留余香
使用微信扫描二维码完成支付

comments powered by Disqus