本博客由MATLAB and Simulink Robotics Arena系列视频的主持人Sebastian Castro于2018年4月11日发布。
机器人操作臂概述
Let’s start with a quick comparison of kinematics and dynamics.
- Kinematics运动学 分析不考虑力作用下的运动,一般只需要操作臂的几何特征,比如长度和自由度
- Dynamics动力学 分析由力作用引起的运动,除了几何特征,还需要质量和惯性参数用来计算操作臂连杆的速度和运动等
机器人操作臂通常由关节结构组成,而关节结构又可以分为旋转关节revolute (rotating) 和移动关节 prismatic (linear) 。因此,可以在三维空间中通过控制关节位置得到末端执行器的位置。
假设已知机器人的几何特征和全部的关节位置,通过数学计算可以得出机器人上任意一点的位置和姿态。这就是正向运动学Forward Kinematics.它的逆问题,往往需要求得使末端执行器到达某个具体位姿的关节角度。这也称作逆向运动学Inverse Kinematics。
逆向运动学求解
Depending on your robot geometry, IK can either be solved analytically or numerically.
- 解析解Analytical solutions 意思是可以得到给定末端执行器位置下关节位置的闭式表达式。这种方法属于离线方法,求解IK速度很快
- 数值解Numerical solutions 一般而言,数值解比解析解求解要慢,而且更难以预测,但是数值方法可以求解更难更复杂的问题。然而,这些方法引入了初始状态的不确定性、优化算法的选择性甚至带有随机性(However, these solutions introduce uncertainty in the form of initial conditions, optimization algorithm choice, or even random chance),所以有时候求解的结果并不是我们想要的结果。
末端执行器的位姿可以由6个参数定义:其中3个定义其位置,另外3个定义其姿态。通常,如果操作臂至多有6个自由度并且期望位置是可达的,那么我们可以得到它的解析解。
机器人设计者对高于6个自由度机械臂保证仍有解析解的设计变得越来越灵活。例如,在我学习优达学城的机器人软件工程这门纳米学位课程 Udacity Robotics Software Engineer Nanodegree中,有一个求解库卡KR210 6自由度机械臂 KUKA KR210 逆运动学解析解的project。这款机器人有一个球形手腕,可以解耦位置和姿态的逆运动学解析解。 You can find my writeup on GitHub.
那么,你为何会想到选择数值求解方法呢?原因有以下几点
- 操作臂有冗余自由度(always in the case with 7 or more)
- 不想求解数学表达,而且有求解数值解的计算资源
- 目标位姿无效,但仍显尽可能地到达靠近该位姿地效果
- 解析解可能有多种解,甚至时无穷解
- 想要引入多个复杂的约束

多种解析解的情况(图中是处理解析解相对容易的情况) 左图IK有两个解,上部分解和下部分解 右图IK有无穷个解,因为绕着base的任意水平旋转都是有效的

复杂的操作臂更可能选择数值方法求解IK 左图7自由度操作臂可以有多个关节角方式达到同样的末端执行器位姿 右图操作臂上两个连杆坐标系间的位置约束示例
总结而言,IK解析求解通常更快,更准确和更可靠。但是,当遇到复杂的操作臂结构,数值解往往更容易执行,或者有时是别无选择的。
在MATLAB和Simulink中演示操作臂
在MATLAB和Simulink中有两种固定的添加操作臂的方法。
MATLAB
- 创建刚体结构树对象的方法 rigid body tree object
- 使用场合:用于求解运动学和动力学,提取机械特征(例如雅可比,质量矩阵,重力力矩等)
Simulink
-
创建Simscape Multibody模型(a Simscape Multibody model)
Simscape Multibody™(前身为 SimMechanics™)提供了适用于 3D 机械系统(例如机器人、汽车悬架、建筑设备和飞机起落架)的多体仿真环境。可以使用表示刚体、关节、约束、力元件和传感器的模块对多体系统进行建模。可以使用 MATLAB® 变量和表达式对模型进行参数赋值,在 Simulink® 中设计多体系统的控制算法。
-
使用场合:用于系统级别的动力仿真,加入驱动器的物理模型和接触机制等

上述两种方法,无论是刚体结构树对象还是Simscape Multibody模型,都可以从零开始搭建,也可以通过URDF文件直接加载。另外,Simscape Multibody还可以从CAD软件导入3D模型。关于如何导入CAD模型导入Simscape Multibody,我的同事 Christoph Hahn写了一篇相关博客。
从MATLAB 2018a开始,机器人系统工具箱RST包括操作臂算法仿真功能块库Manipulator Algorithms Simulink block library。通过这些功能块我们可以在Simulink中对刚体结构树对象进行运动学和动力学分析,这使得可以联合使用上述两种(MATLAB和Simulink)添加操作臂的方法,进行系统建模和控制系统设计。这些功能块可以生成C/C++代码,所以我们不用MATLAB和Simulink也可以部署独立的算法。
在MATLAB和Simulink中求解IK
Robotics System Toolbox为操作臂提供了两种逆向运动学数值求解器。
- Inverse Kinematics: 考虑了关节极限,允许对每个位置和姿态施加相关权重
- Generalized Inverse Kinematics: 允许添加多个复杂的额外约束,例如坐标系之间的相对位置、末端执行器朝向或者时变的关节极限角度等
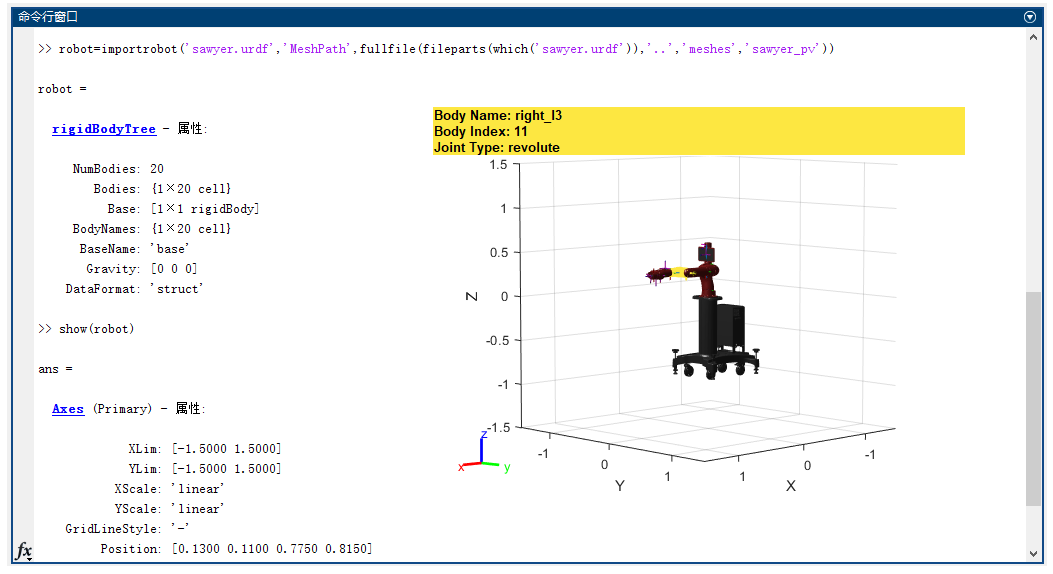
下面是在MATLAB中求Sawyer逆运动学解的GIK Solver求解器。此处,对末端执行器的位置设置了约束——让末端执行器的一直朝向空间中的一个点。
sawyer=importrobot('sawyer.urdf','MeshPath',fullfile(fileparts(which('sawyer.urdf')),'..','meshes','sawyer_pv'))
gik = robotics.GeneralizedInverseKinematics('RigidBodyTree',sawyer,'ConstraintInputs',{'position','aiming'});
% Target Position constraint
targetPos = [0.5 0.5 0];
handPosTgt = robotics.PositionTarget('right_hand','TargetPosition',targetPos);
% posTgt = constraintPositionTarget('right_hand');
% posTgt.TargetPosition=[0.5 0.5 0];
% Target Aiming constraint
targetPoint = [1, 0, -0.5];
handAimTgt = robotics.AimingConstraint('right_hand','TargetPoint',targetPoint);
% aimCon = constraintAiming('right_hand');
% aimCon.TargetPoint = [1 0 -0.5];
% Solve Generalized IK
[gikSoln,solnInfo] = gik(sawyer.homeConfiguration,handPosTgt,handAimTgt)
show(sawyer,gikSoln);

Inverse Kinematics in the Bigger Picture
测试了IK求解器后,可以应用MATLAB和Simulink搭建更完整的机器人操作臂系统,例如:
- 在IK中加入机器人动力学仿真
- 添加其他算法,例如监控逻辑,感知和路径规划
- 自动生成标准的C/C++代码,部署到硬件上或者类似ROS的中间件上
We discuss this in our video “Designing Robot Manipulator Algorithms”
总结
很多人可能正在研究已经带有固有关节扭矩控制器的机器人算法。从这个角度出发,你可以假设机器人关节能够充分地跟踪到你所提供的任何设置点。
单独使用运动学也可以有效地设计运动规划算法,以及分析机器人几何学,例如工作空间分析或者检测碰撞
In the next part, we’ll talk more about manipulator dynamics and how this facilitates lower-level control design applications with MATLAB and Simulink.下一部分,我们会讨论操作臂地动力学以及它是如何使MATLAB和Simulink低级控制设计应用变得容易的。
Feel free to leave us a comment or email us at roboticsarena@mathworks.com. I hope you enjoyed reading!
– Sebastian
Reference
MATLAB Racing Lounge Blog - Robot Manipulator,Part1:Kinematics
「真诚赞赏,手留余香」
 Self-Disciplined and Motivated
Self-Disciplined and Motivated
真诚赞赏,手留余香
使用微信扫描二维码完成支付

comments powered by Disqus